
オンライン決勝
2020年9月23日~11月6日に「第2回自動運転AIチャレンジ決勝」を開催いたします。
本大会は本年6月14日に東京大学生産技術研究所附属千葉実験所(柏キャンパス内)で実車を使用し競技を行う予定でしたが、新型コロナウィルス感染拡大に伴い中止となりました。
参加者は、プログラムを提出しシミュレーションの結果で優劣を競う内容となります。
第2回自動運転AIチャレンジ オンライン決勝競技出場チーム(エントリー順)
- Shallow Learners
- 自動運転車勉強会
- MTL*
- tomo123*
- KHK
- NWC-WIN
- MPRG
- 🔧🌟@
- gatti
- Windridge
- Yurara*
- DeepLearners
*第2回AIエッジコンテストからの出場。それ以外は第2回自動運転AIチャレンジオンラインシミュレーション予選の上位チーム
競技概要
コロナ禍でフードデリバリーサービスの需要が急増する中、物流と防災の観点からも実現が期待される自動運転車での配達。本競技では、自動運転車でいくつかの課題をクリアしながら注文品を損なうことなく迅速丁寧に届けるというタスクをオンライン上のシミュレータで競う。
結果公表
12月中旬に結果を公表し、表彰式(一部オンライン)を開催予定です。
ご取材の案内は、後日お送りいたします。
12月下旬には、各チームが作成したプログラムから走行映像を作成し解説付きで仮想的に並走させた動画を公開します。参加者インタビューなども公開予定です。
競技全体に関するルール
- Autowareで利用可能なオープンソースシミュレータ(LGSVL)を活用したシナリオを走破できるソースコードを作成いただきます。
- シナリオは、スタート地点からゴール地点までの時間を競うタイムアタック競技とします。
- 参加者は、与えられたシナリオをクリアできるようソースコードを作成して、まずはローカル環境で検証をします。
- オンライン環境にソースコードをアップロードすることで、オンライン上でシミュレーションが実施されて、タイムが出ます。最後にアップロードされたソースコードのシミュレーション結果のタイムに基づいて順位を決定します。(例えば、アップロード1回目の結果は5分、2回目は3分、3回目は4分、の場合、最後に提出された4分を採用(ベストスコアの2回目3分ではない)
シナリオに関する説明
- あらかじめ定められたルート上のチェックポイントを通過して走行します。逆走やショートカットは不可です。
- 車両速度は最大30km/hに設定します。30km/hを超えた場合には失格となります。
- 制限時間は5分です。5分を超えた場合には失格となります。
- 元々地図上に存在する建物など以外に、歩行者と他車両が障害物として出てくる設定で、障害物に衝突した場合には、失格となります。
- 障害物を回避するために、一時停止をすることも、(停止せずに)走行しながら回避することも可能です。
- ローカルシミュレーションとオンラインシミュレーションでは、歩行者と他車両が出てくるタイミング、形状、場所、移動スピードなどの設定が異なります。

- ①~⑥は本シナリオでの主なポイントです。
- ルート、各ポイントは凡そのものであり厳密ではありません。
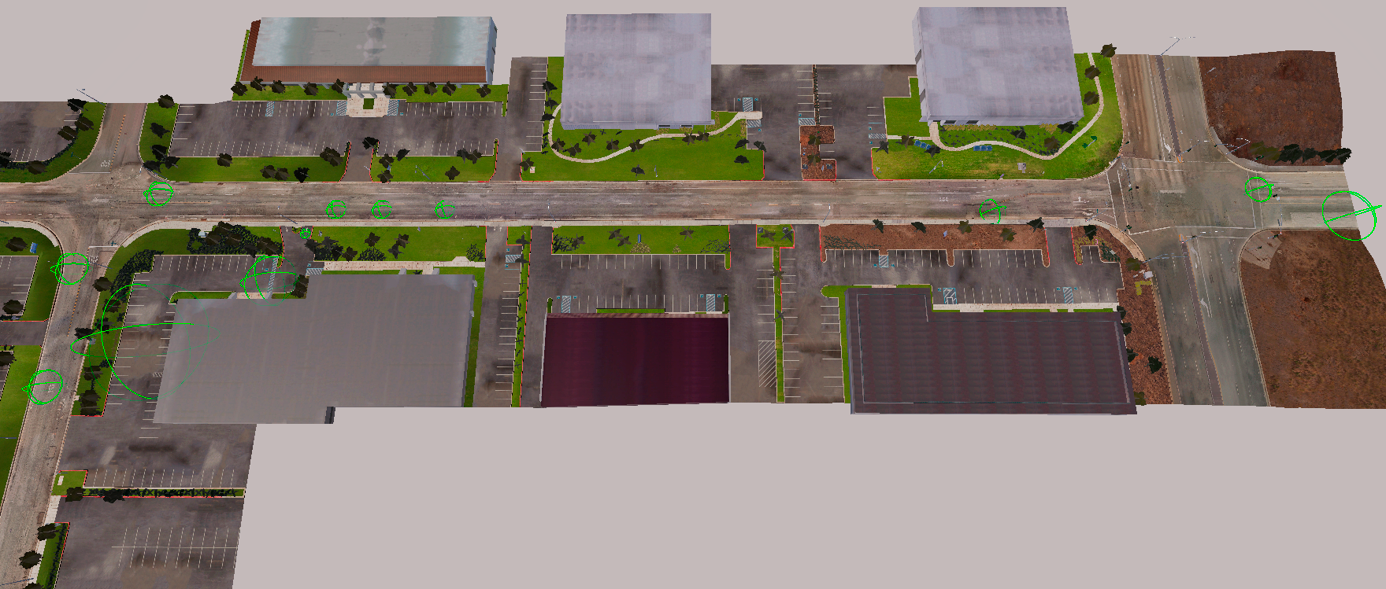
- 緑色の球形がチェックポイントの凡その場所となっています。
- これらのチェックポイントをルート順に通過する必要があります。

シナリオ紹介 ①道路を横切る歩行者と路駐車両の回避
車道上を歩行者が右から左へ横切ります。
また、車道上に路駐車両が存在します(左の参考画像には写っていません)。
ローカル環境とオンライン環境のシナリオでは、人数や服の色、速度、出現タイミング・場所などが異なります。

シナリオ紹介 ②交差点で左側から来る車両を回避した左折
交差点で左側から車両が走行してきます。
信号はありますが、常に青色です。
左側から走行してくる車両は、(交差点前に一時停止線がありますが)一時停止はせず走行してきます。
ローカル環境とオンライン環境のシナリオでは、車両タイプ、色、速度、出現タイミングなどが異なります。

シナリオ紹介 ③対向車を回避した駐車場への左折
対向車が走行してきます。
ローカル環境とオンライン環境のシナリオでは、車両タイプ、色、速度、出現タイミングなどが異なります。

シナリオ紹介 ④駐車車両を回避した駐車場内の走行
駐車場内に駐車車両があります。
ローカル環境とオンライン環境のシナリオでは、車両タイプ、色、数、駐車場所などが異なります。

シナリオ紹介 ⑤低速で走行している車両に対応した走行
走行車線を車両が低速で走行しています。(対向車線を走行している場合もあります(車両は巡回しています)。)
車両を回避して、追い抜くことも、追従していくことも可能です。
ローカル環境とオンライン環境のシナリオでは、車両タイプ、色、出現タイミングなどが異なります。
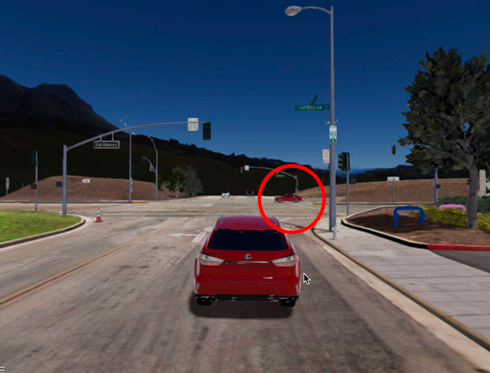
シナリオ紹介 ⑥左右から来る車両を回避した交差点の直進
交差点で左右両方向で車両が走行しています。(左図では右方向からの車両しか写っていませんが、左方向からの走行車両も存在しています)
信号は常に青色です。
ローカル環境とオンライン環境のシナリオでは、車両タイプ、色、数、出現タイミングなどが異なります。

(参考)自車両の走行
自車両は、基本的には走行車線を走行することを想定していますが、車道内であれば対向車線等を走行することも可能です。
車道、駐車場以外を走行することは禁止です。

(参考)対向車の走行
対向車が走行している部分もありますが、センターラインを超えて対向車が走行することはありません。
なお、駐車場内には他車両は走行していません。
オンライン環境でのシミュレーション
- アップロード方法はgithubの本大会用レポジトリのREADMEに掲載します。
- シミュレータの仕様上、同じソースコードをアップロードしたとしても、同じ結果が出るとは限りません。
- オンラインでのシミュレーション回数は各チーム1日3回までに限定します。毎日0:00に回数をリセットします。
- オンライン環境の障害等が発生した場合には、速やかにgithubで通知します(PM6時~AM9時に発生した場合は翌営業日)。影響に応じて、対応は別途検討します。
質問や情報更新のお知らせ
- 質問事項がある場合はgithubのissuesを通じてお願いします。基本的には2営業日中に回答しますが、質問数が多い場合や回答が困難な質問の場合は、回答が遅れる、もしくはできない場合があることを了解ください。
- 情報の更新などがあった場合には、随時github上のREADMEを更新します。更新情報を通知するissueを作成しますので、subscribeをお願いします。subscribeいただければ、更新時に通知されます(通知をオンにしてください)。
終了後の結果表示
- 各チームのオンライン環境でのシミュレーションに関する最終タイムを以てランキングを決定します。なお、本戦期間終了後、結果検証を行うため、検証終了を以て順位確定となります。
- 本戦期間終了後、上位数チームのコードについて、事務局側でシミュレータを回して、シミュレーション映像を本大会の参考映像として取りまとめます。なお、シミュレータの仕様上、走行タイムについてはオンライン環境時と映像作成時で完全には一致しない可能性があることは御理解ください。(オンライン環境時の成績でランキングは決定します)。
※ローカル環境とオンライン環境で結果が大きく違う場合などに何らかの疑義がある場合には、本戦期間終了までに、事務局に連絡をお願いします。
その他
- 今回の本戦競技は、あくまでもシミュレーション競技のため、実際の道路環境や交通ルールとは必ずしも合わない走行となることは御了解ください。
- シミュレーションの仕様上、同じコードでも毎回同じタイムが出るわけではありません。
- 事前に検証を行い、技術的な課題などは減らすよう取り組んでおりますが、事務局が想定していない課題などが発生する可能性があることを御理解ください。
推奨環境
◎Autoware推奨環境
*「Autoware」は、The Autoware Foundationの登録商標です。
| 要素 | 推奨スペック |
|---|---|
| OS | Linux(Ubuntu18.04) |
| CPU | Intel Corei7(8コア) |
| メモリ | 16GB 以上 |
| ストレージ | SSD 30GB 以上 |
| GPU | NVIDIA Geforce GTX 1080 以上(GPU実装のあるノードを使用する場合) |
Autowareのセットアップ(v1.13.0)
https://gitlab.com/autowarefoundation/autoware.ai/autoware/-/wikis/Source-Build
◎LGSVL推奨環境
- 上記Autoware推奨環境と同等。
- Autowareと同時起動する場合はメモリ32GB以上、GPUはRTX2080以上推奨。
本シミュレータはWindows上でも動作するため、別途環境を用意しても良い。
開発コードの権利および免責事項
当競技のシステムにアップロードされたコードの権利はコード開発者に属します。自動車技術会およびその業務委託先は、電磁的に提出されたデータ(コード)について、競技課題のスコアリング、結果検証の目的にのみ使用し、当該使用について開発者は利用許諾をするものとします。また、前記目的が完了次第破棄するものとします。開発者は、自ら提出したコードについては予選終了後に自動車技術会およびその業務委託先によって削除されることに予め同意するものとし、これに対して異議を述べないものとします。自動車技術会およびその業務委託先(クラウド環境などの再委託先含む)は、 電磁的に提出されたデータ(コード)について善良なる管理者の注意義務をもって取扱いますが、盗難、ハッキングその他不可抗力により発生した損害に対し免責とさせていただきます(本会および本会委託先の故意、過失によるものを除く)。