6.2 蓄電・充電関連
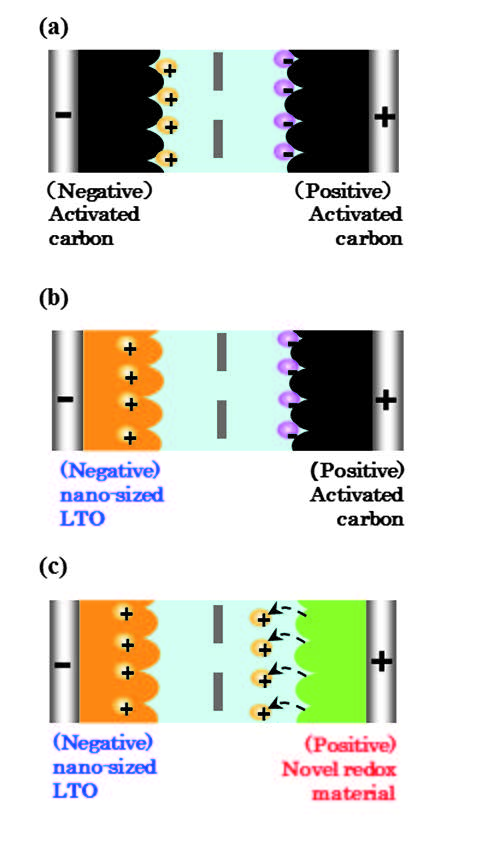
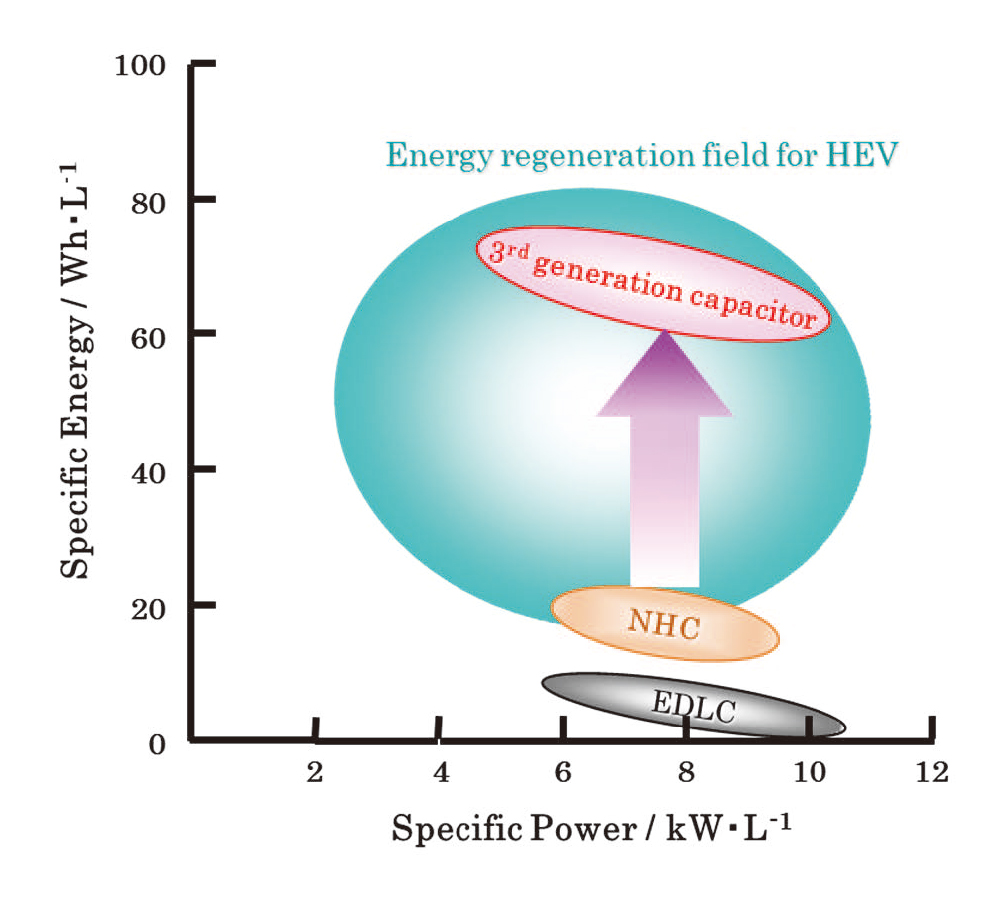
EDLC(電気二重層式キャパシタ)は,高電流レートでの回生エネルギーの吸収が可能であり,物理現象によることから電池に比べて安定であるが,動作電圧が低いことと静電容量に関係する活性炭の表面積も理論上限界に来ていることから大幅なエネルギー密度の改善が期待できないのが現状である.湊ら(6-2)は,この様な現状を打破してエネルギー密度の向上を図って開発した二つの蓄電デバイスについて紹介した. Liイオンキャパシタ(LIC)のLiB電極としては安全性の高いチタン酸リチウム(LTO)が注目されているが電気伝導性が低いことやLiイオン拡散速度が遅いことから高電流レートでの特性に難があることが知られている.そこで5~20nm程度のナノ結晶LTO(nc-LTO)を開発し,ナノ結晶化によって前述の高レートでの特性の改善を図った.一つは負極にnc-LTOを用いたLICで図6-12の(b)に相当するもので,ナノハイブリッドキャパシタ(NHC)と呼ぶ.もう一つはこの正極に新規開発の高出力レドックス材料を用いた同図(c)のもので,第3世代キャパシタ(Gen. 3 Cap)と呼ぶ.これらの関係は図6-13に示す様に,出力密度を落とさずにエネルギー密度をそれぞれ3倍,15倍に向上したものとなる.
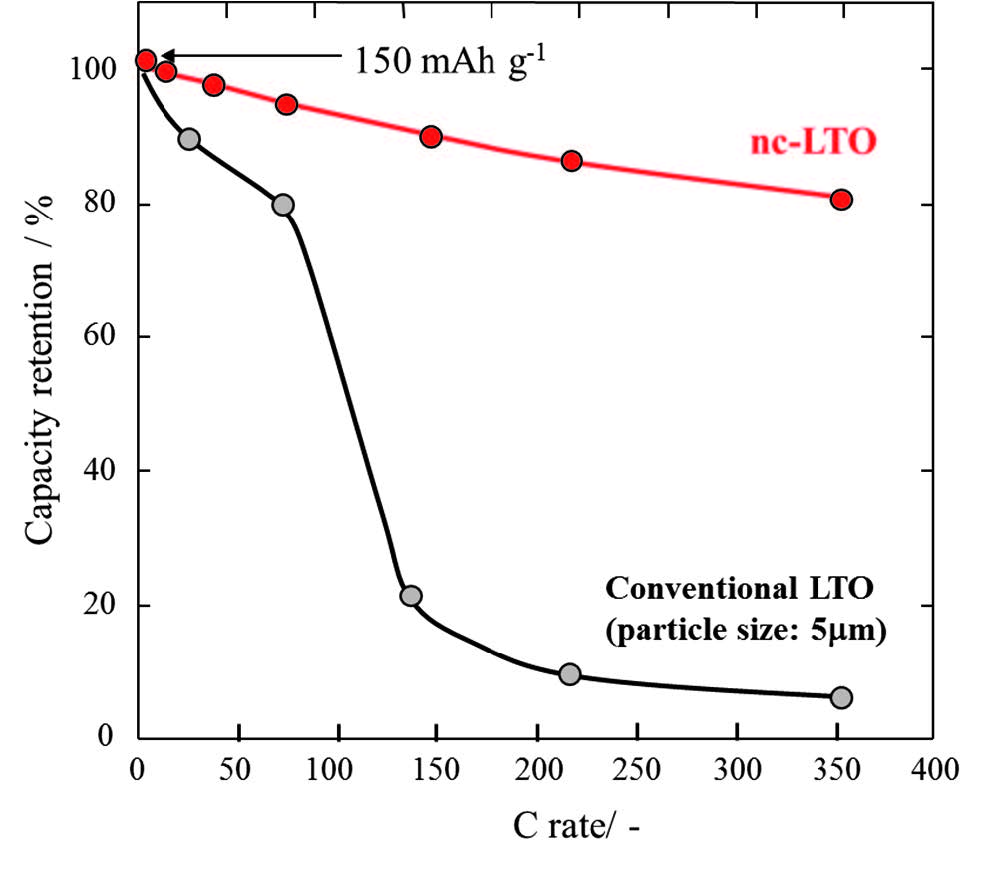
試作したNHCの各種試験を実施し,期待した特性を満たすことを確認している.図6-14に示すとおり,通常のLTOを用いたLICは高電流レートで容量が低下するが,nc-LTOを用いたNHCではその低下が大幅に改善されることが確認出来た.エネルギー密度はEDLCの4.2Wh/Lに対してNHCは13Wh/Lで約3倍が確保された.
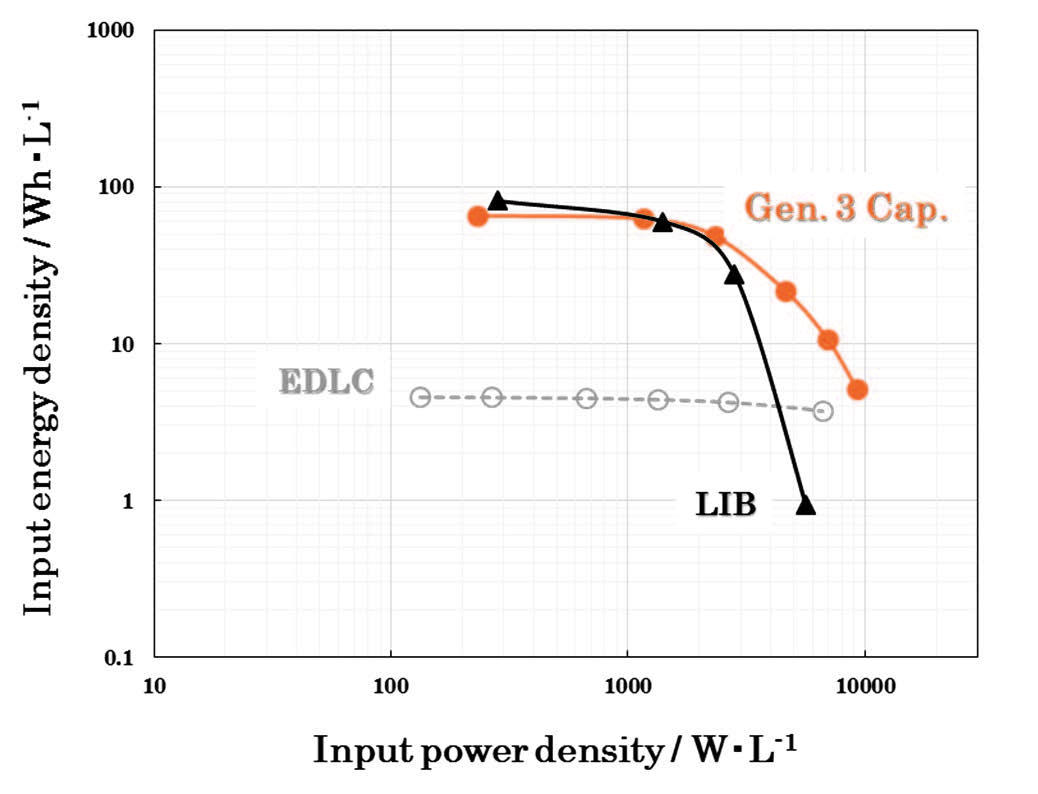
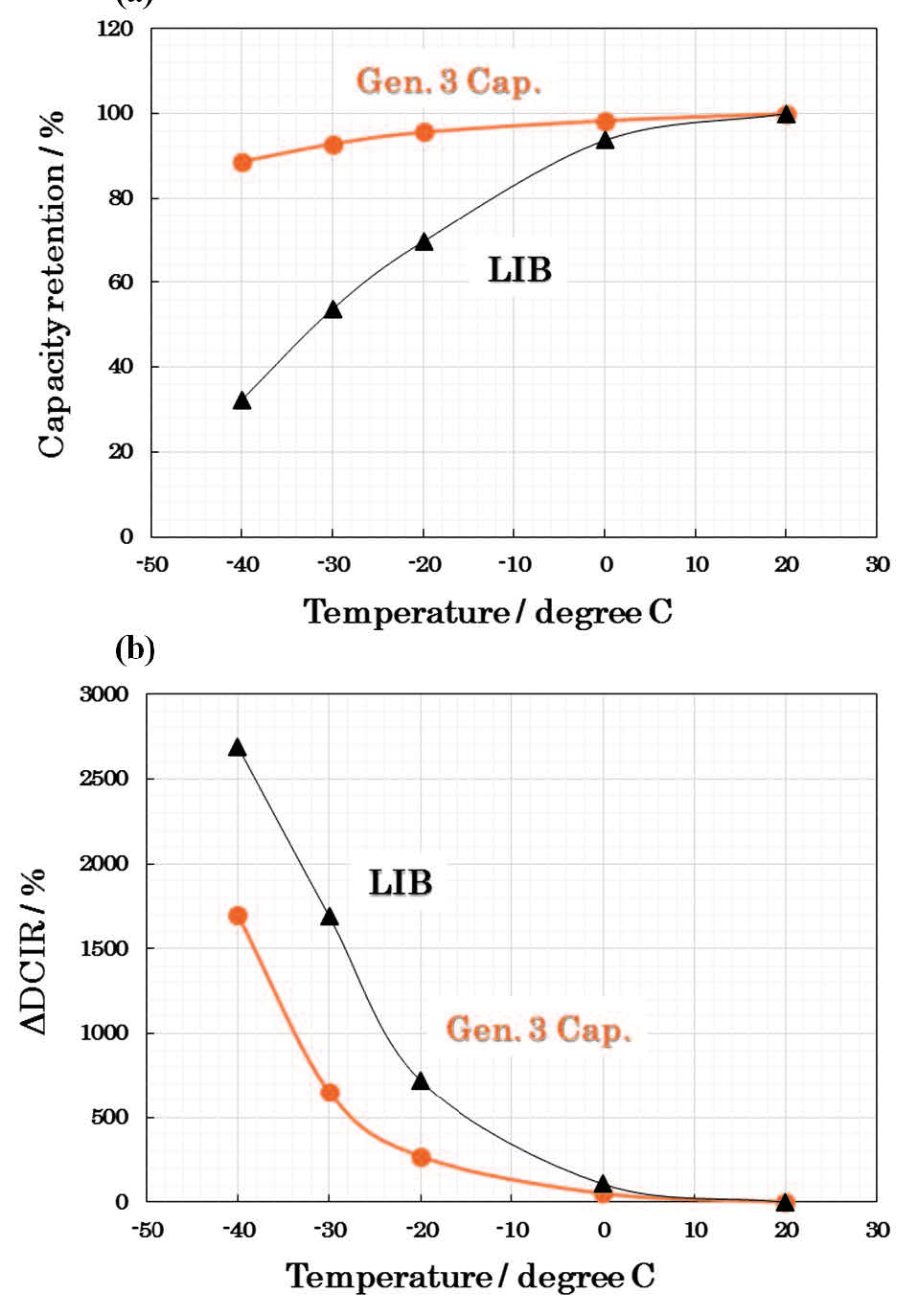
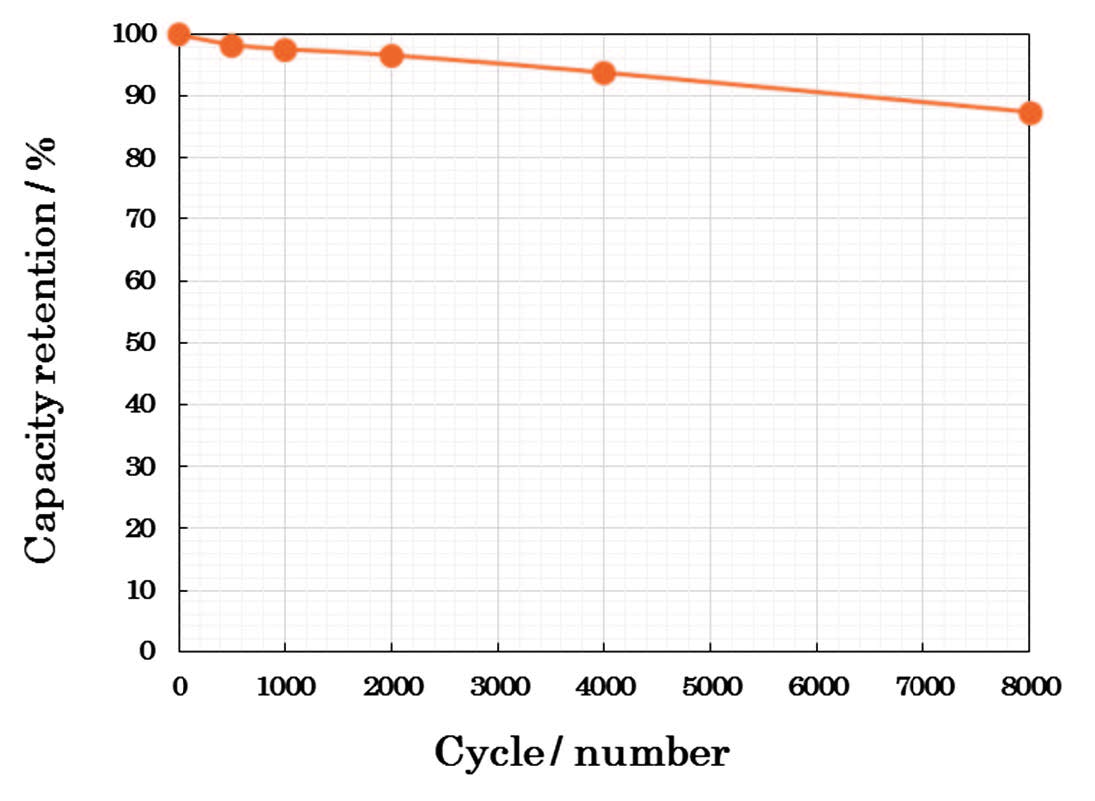
試作したGen. 3 CapとLIB,EDLCのラゴンプロット(出力密度とエネルギー密度の関係を示す図)を図6-15に示す.Gen. 3 CapはLIBと同様の70Wh/Lのエネルギー密度を確保しつつ,EDLCと同程度の高レートでの特性を確保出来ていることが分かる.低温時の特性は,図6-16に示すとおり,LIBよりも高い容量と低い内部抵抗値を示しており,LIBより有利であるが,50℃での充放電試験(図6-17)ではLIBと同程度の容量維持に留まっている.
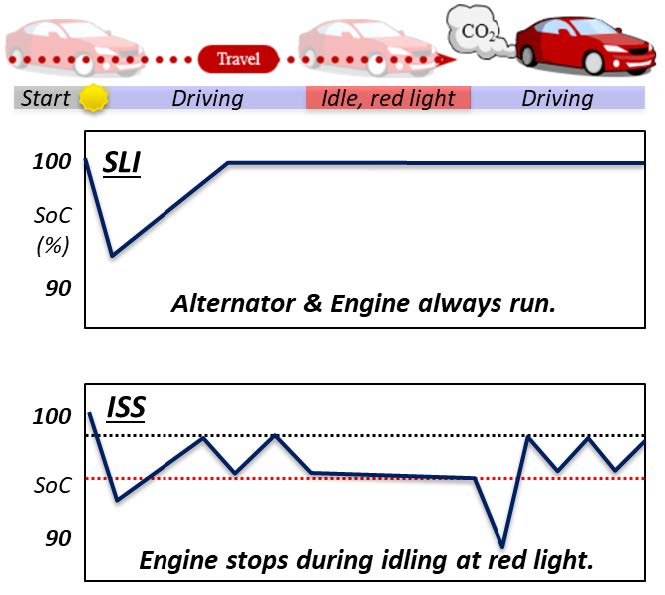
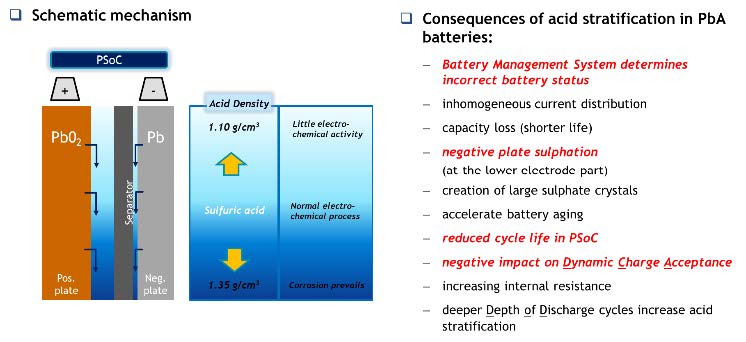
電動車両用ではないが,ICEVの省エネ対策の一つであるアイドルストップ機能の普及によって,鉛酸電池にも従来の電池とは異なる要求があり,これに対応するためにセパレータの工夫で対応し,良い結果が得られていることがMiyake(6-3)らから紹介された.従来の鉛電池はエンジン始動時の放電以降は常に充電状態にあり,やや過充電気味の状態で使用されてきた.そのため緩いガッシングによって電解液が循環し電解液の濃度が電解槽内で均一になっていた.これに対しアイドルストップシステム車(ISS)では図6-18に示す様に,頻繁なエンジン停止と再始動によって電池のSOCが低位にある状態となったため,ガッシングの機会がなくなり,電解液濃度の層状化(上部で濃度が低く,底部では濃くなる;図6-19参照)などによって電池性能の劣化・寿命の低下などの問題が発生し各種の対策が必要となっている.
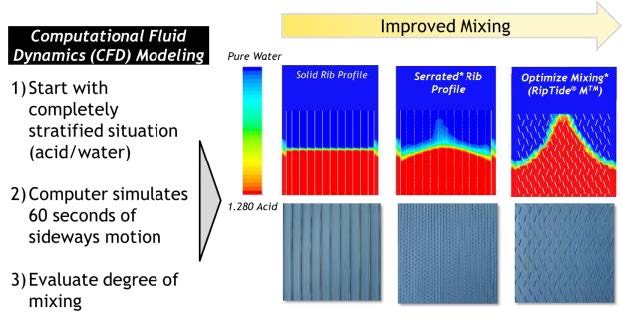
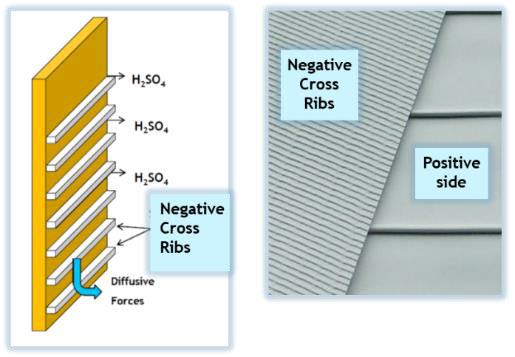
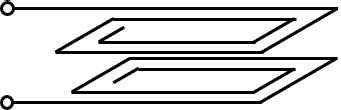
第一のキーは,リブを設けたセパレータの工夫によって,車両の発進停止の運動によって電解液の攪拌を実現しようとするものである.電解液の運動をPC上で模擬するモデルを作成し,セパレータの形状と車両の発進停止による電解液の挙動との関係を調べ,効果的な形状を求めている(2層に分離した状態から,車両の運動によってどのように攪拌されるかを確認;図6-20参照).広い実使用状態での挙動を把握する様々な努力を経て,図6-21に示す正極側に水平のリブを多数設け,負極側には多数の細孔を設けたセパレータを提案している.
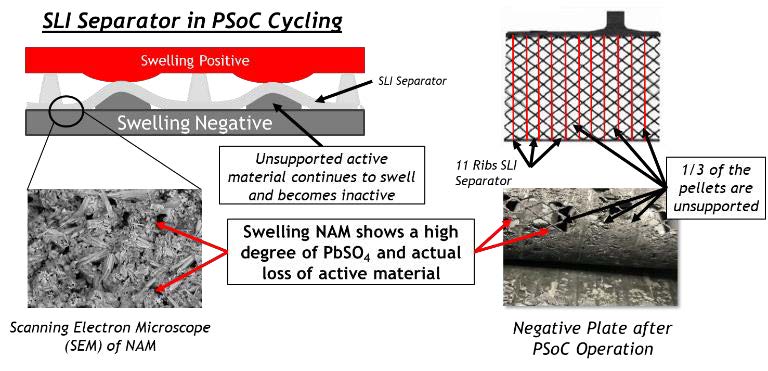
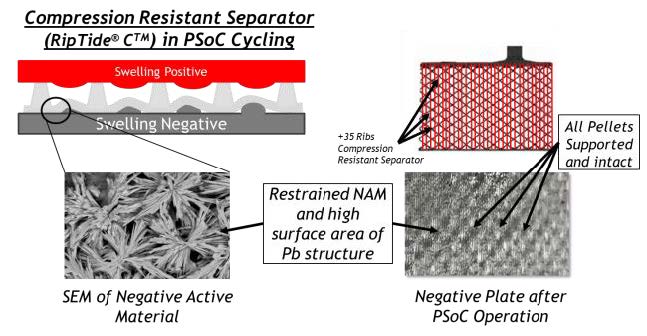
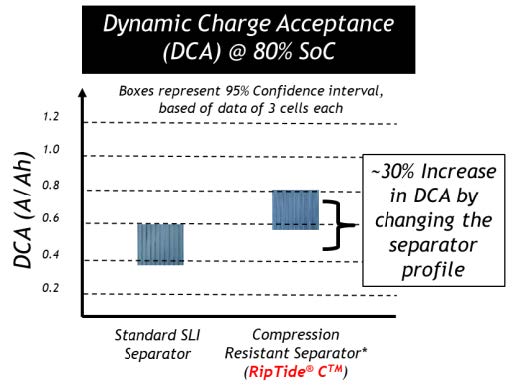
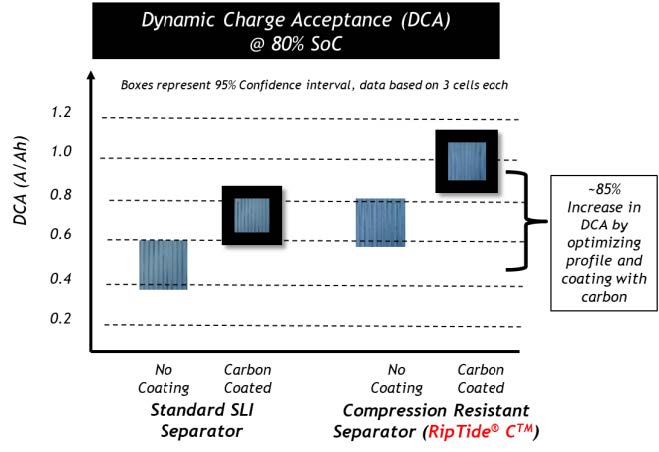
次に,ISS車では制動時の回生電力を効率よく受け入れる必要があるが,部分放電状態ではこの特性が低下することが知られており,この対策として市販電池では負極にカーボンを添加する方法が採用されている例もある.しかし,これによるデメリットとして水の減少とその結果としての寿命短縮が問題となっている.部分充放電動作で,一般のセパレータによる電池では負極が膨張し活物質の減少がみられる(図6-22参照)のに対し,提案する負極側に細孔を,正極側に多数のリブを設けたセパレータでは負極が均一に圧縮抵抗力を受けるので,この現象がみられず(図6-23参照),実際の試験で急速充電受け入れ性が30%改善したことが確認出来た(図6-24参照)としている.一方,カーボンが鉛結晶の増大化を阻止しているメカニズムを解析した結果,負極表面に接触するセパレータの表面をカーボンでコーティングすることで同様の結果が得られることを見いだし,試験によってこの考えの妥当性を確認している(図6-25参照).製造時の素材原価では5%以下しか占めないセパレータの工夫で,性能向上と寿命延伸を可能としたとしている.
EVやPHEVが順調に普及した場合,その充電負荷が電力系統に与える影響と影響の改善方法が問題になって来ると考えられる.ITSのセッションで,この件に関する2件の発表があった.
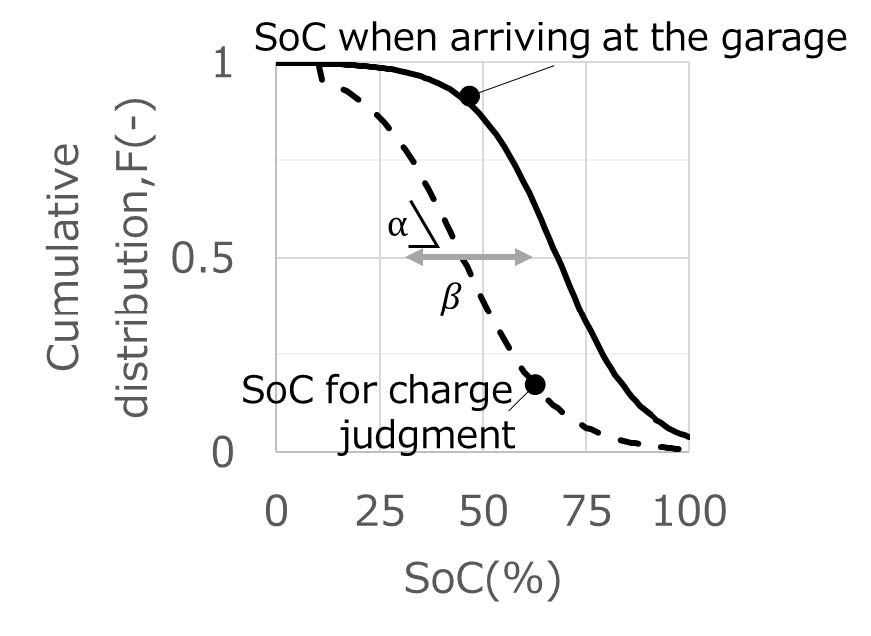
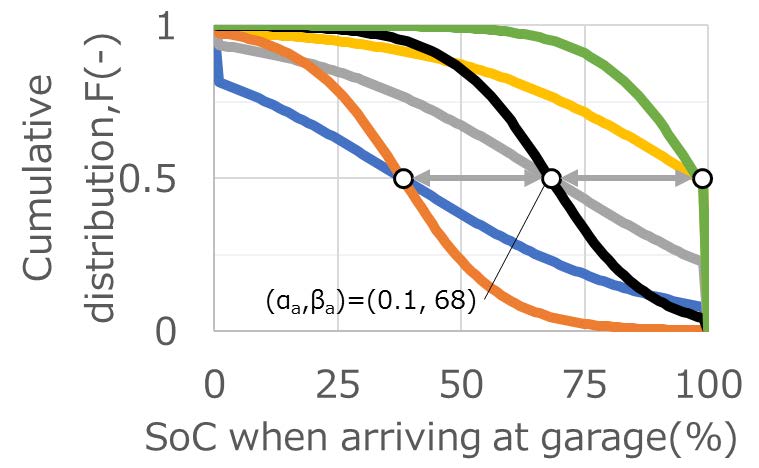
小田(6-4)らは,太陽光発電等の再生可能エネルギーの出力が増大した際に電力系統からのデマンドにEV充電が応じることを想定し,EV充電で対応可能な電力量を求める試みについて紹介した.自宅などでのいわゆる基礎充電場所に到着したEVのSOC(帰着時SOC)分布とEVユーザがSOCを参照して判断する充電の要否の関係を,EV利用者を対象に実施したアンケートから求めた.搭載電池の平均容量は20kWhで,出発時のSOCは平均80%(標準偏差:22.5),帰着時SOCは平均53%(標準偏差:21.4)で,全体の39%が充電の要否を帰宅時SOCで判断していた(36%は毎回充電.要否判断のSOCは数値で回答).この状態を基準ケースと呼ぶ. この充電判断基準SOCと帰着時SOCが正規分布を成すと仮定すると,累積頻度分布Fは式(1)で表される.
F=1-(1+e-α∙(SOC-β) ) -1 (1)
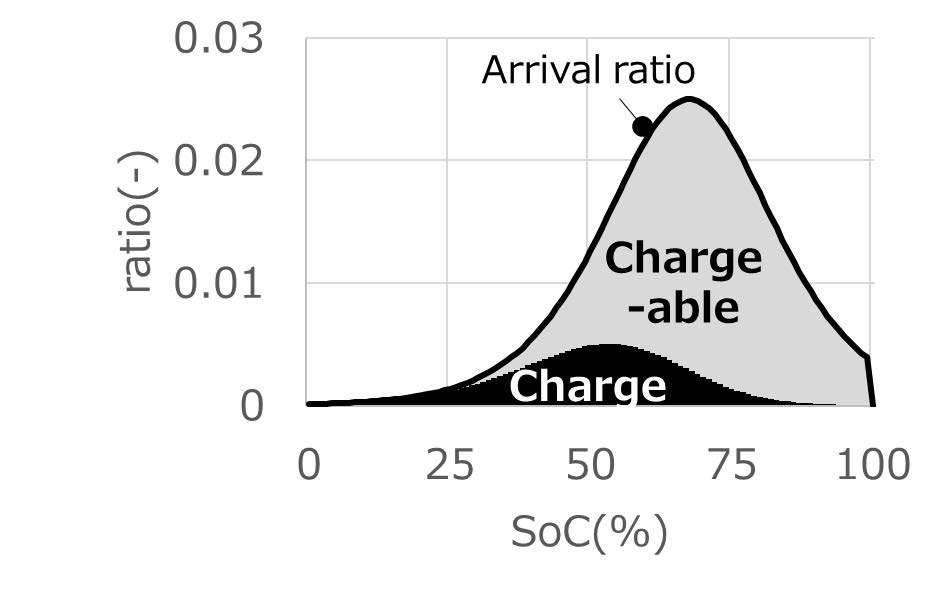
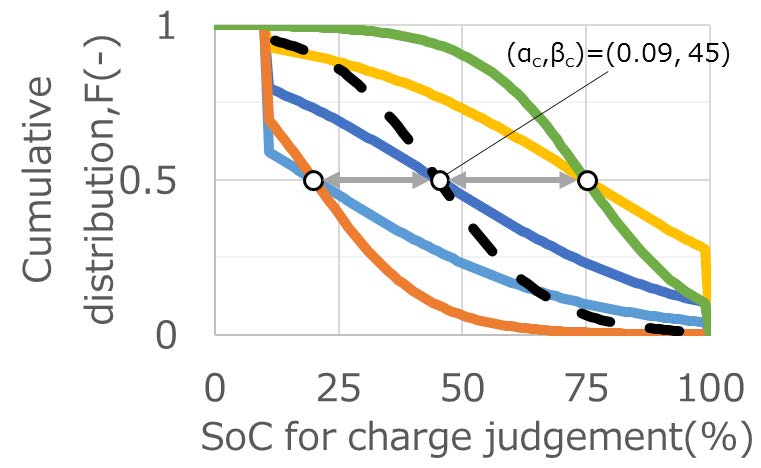
ここに,αは図6-26に示すとおり累積分布の傾き,βは累積値が50%になるSOCとなる.ただし,帰着時SOCが10%以下の場合は,必ず充電するとし,式(1)の値によらず,F=1とする.充電と充電可能状態の頻度分布は図6-27に示すとおりで,帰着EVの5台に1台が平均約10kWhの充電をしていること,デマンドに応じて充電可能な量は1台あたり4.7kWh程度であることがわかる.
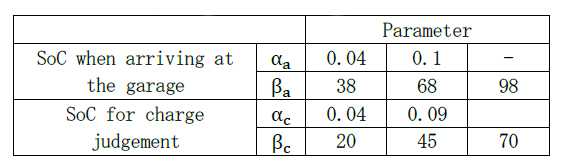
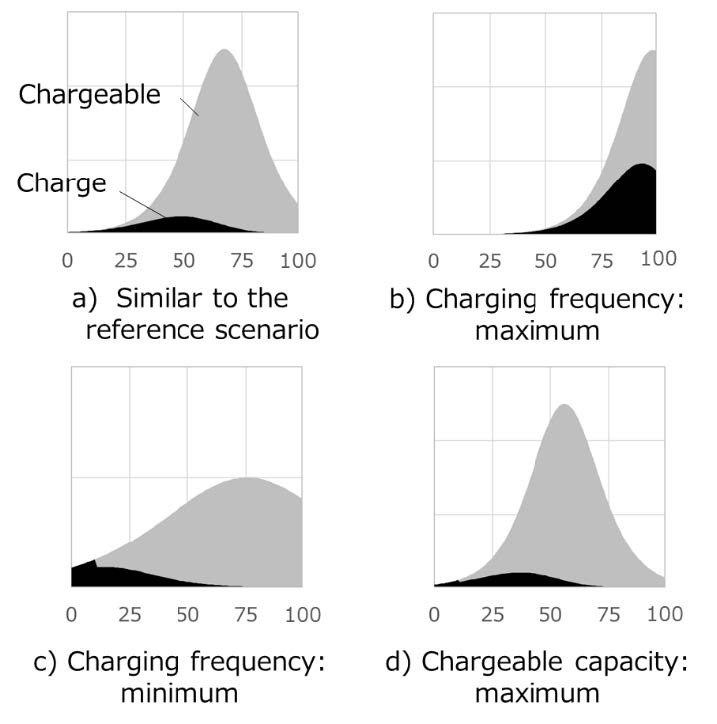
将来,搭載電池容量が増加した場合(例えば40kWh),EVでの選択幅が広がることから,α,βの値として表1の最左列の組み合わせを追加し,2種のα値,3種のβ値を組み合わせた6シナリオの累積分布(図6-28,図6-29参照)について,帰着時に充電する頻度と充電可能ではあるが充電しない頻度,充電電力,充電可能電力を求めている.だだし,搭載電池容量が増加してもEVの走行需要に変化はないと仮定した.このため,搭載容量の違いによる帰着時SOCや充電判断基準SOCの整合性をとることを試みており,これによる4種によって計24シナリオが存在するが,充電電力量の大きさに矛盾が生じるケースなどを除外して,19シナリオについて検討し,図6-30に示す特徴的な4シナリオについて解説している.a) は基準ケースに準じたもの,b) は充電頻度が高くなるシナリオ,c) は逆に充電頻度が最小のシナリオ,d) は充電可能の電力が最大になるシナリオである.
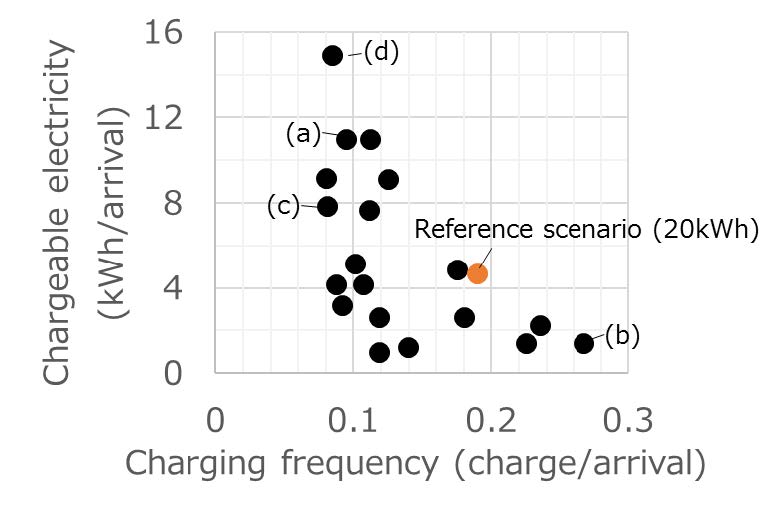
図6-31に各シナリオの充電可能電力の大きさと充電頻度の関係を示す.朱色の20kWh電池の基準ケースに対して,2倍の40kWh電池で充電頻度が高くなることはあり得ないので4シナリオの内(b)は不適当であるが,他の3シナリオはいずれも充電頻度が半分程度になり,充電可能電力が5kWhから8~15kWhへと約2~3倍に増加可能であることが示唆されるとして,搭載電池容量の増加がEVのデマンド対応能力を大きく高めることを示唆した.
これに対して,鈴木(6-5)らはユーザの充電行動モデルを内包したEVの充電による電力系統への負荷を把握するシミュレータについて紹介し,これを用いたパラメータスタディから得られた知見についても紹介した.
EVの充電需要モデルは,市販の量産EV(24kWh電池搭載)約11,000台のプローブデータで得られる,各EV毎のキーon/off時の時刻,GPS情報,SOC,旅行距離,充電時の時刻,継続時間,SOC,充電形態(普通/急速/V2H等)を統計処理して作成しており,自宅/職場は駐車時間帯と頻度から推定している.普通充電と急速充電の回数の比率から,ユーザは次の3形態に別れる.
①自宅の普通充電器を主に利用 普通充電の機会が90%以上
②自宅の普通充電器と急速充電器の併用 普通充電の機会が0~90%
③自宅普通充電器を使用せず 普通充電の機会が0%
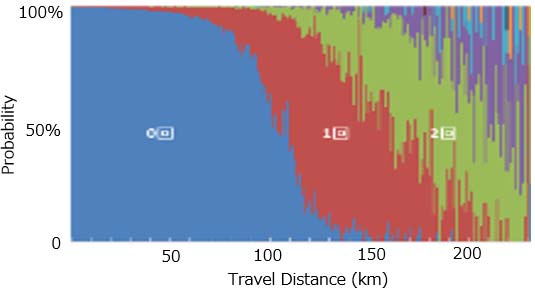
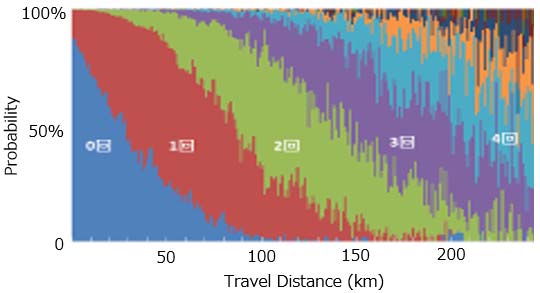
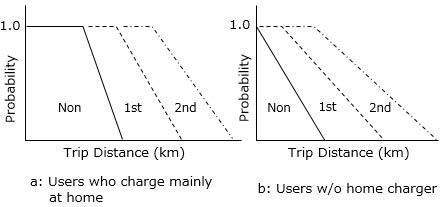
普通充電器を使用しない③は,普通充電器の設置のない集合住宅等に居住するユーザと推測出来る.②は公共急速充電器の定額使い放題などに加入しているユーザと推測でき,特異な条件であるので,①と③のみに着目して解析している.旅行距離毎の急速充電の占める回数は,図6-32(①に対応),図6-33(③に対応)の様に,普通充電器の有無によって明らかな差がみられるので,両者を,図6-34のようにモデル化している(詳細は省略).
自宅や職場で駐車時にどの様な状況でどの程度の頻度で充電するかも重要な情報であるので,両者へ駐車時の充電確率(図6-35参照)をユーザの行動特性として用意している.これらのユーザ行動特性は地域や曜日など,限定した条件下の特性にも対応できるとともに,行動特性を示す確率分布そのものを入力データとして入力できる構造となっており,種々の環境の変化に対応した柔軟なシミュレーションが可能であるとしている.
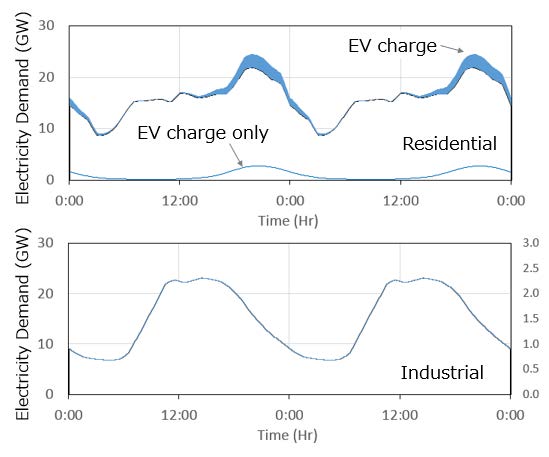
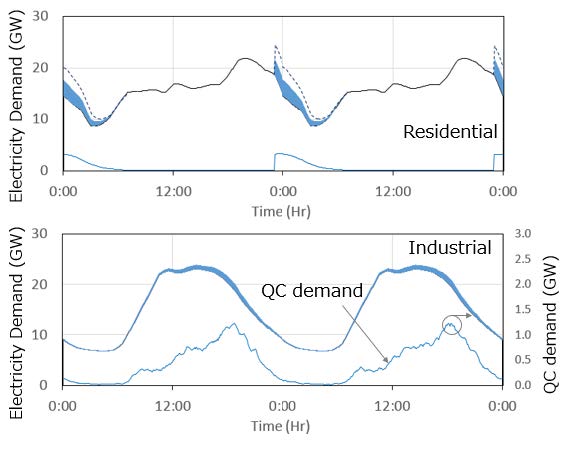
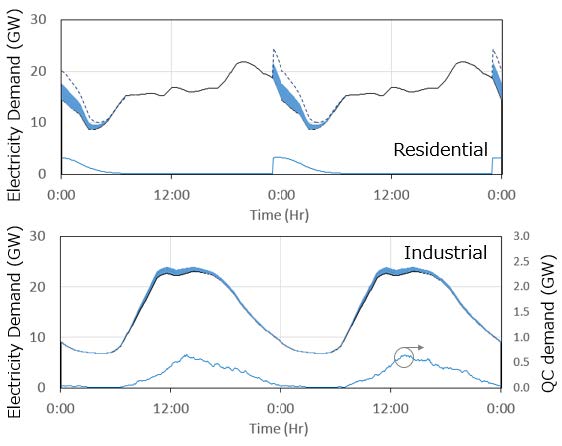
このシミュレータを用いて様々な環境での電力負荷の挙動を検討している.2040年頃のEV化率35%時の,図6-36に示す東京電力管内の電力負荷の模擬結果は,帰宅後の普通充電の絶対量は小さいものの,ピークが家庭部門のピークと重なってしまい,住宅街の電力系統に影響を及ぼすことが予想される.負荷を夜間にシフトさせるための電力価格を設定した場合はピークのシフトができる反面,夜間の初期に新たなピークが発生することが推測されるが,日あたりの走行距離の短いユーザが一定のSOCを目処に充電する様に行動した場合ピークを2.2GW削減出来ると推測している.
また,同時期にも集合住宅での普通充電ができない状態が解消されなかったとすると,必要な急速充電設備の設備費が実現不能な値になるため何らかの改善が必要であるが,職場での普通充電に振り替えることで急速充電のピークを抑えることが可能である(図6-37,図6-38参照)ことを示し,提案のシミュレータの有効性をうたっている.(清水)