
TOP > バックナンバー > Vol.12 No.2 > AI制御技術
モデルベース開発(MBD)はカーボンニュートラルやCASEなどの新価値への対応に資すると考えられるが、サプライヤや研究機関では車両全体のモデル作成は困難である。そこで人工知能技術によりある諸元や走行中に簡単に取得できる値からその他の諸元を推定できればMBDの適用可能範囲が広がる。本研究ではニュートラルネットワークを用い特殊なセンサなしに走行抵抗係数を推定する手法を提案し、さらに低消費電力な実装により車載でのリアルタイム推定を可能とした。シャシダイナモ上の実車から得たデータに対し提案手法を適用した結果、11%未満の相対誤差および装置の消費電力2.1 W以下で走行抵抗係数を推定可能であった。本記事で扱えない詳細は元文献 (1) を参照のこと。
モデルベース開発(MBD) (2) とは、個々の自動車部品の入出力(例えばアクセルの開度と燃料噴射量など)を数式などによりモデル化し、それらを組み合わせて統合的な性能変化等を予測可能にする開発手法である。MBDは従来の試作品による擦り合わせ開発では不可能な計算機上でのシミュレーションを可能とし、カーボンニュートラルに向けた高効率化やCASEに代表される新価値への対応に資すると期待されている。しかしMBDのためのモデル作成は車両全体の諸元を必要とし、サプライヤや研究機関には困難である。そこで目覚ましい発展を遂げる人工知能技術により、ある諸元や走行中の値から他の諸元を推定できればMBDの適用範囲が広がる。本研究ではこの一環として、OBD(On Board Diagnosis)ポートから取得可能な値から走行抵抗係数の推定を可能にする。
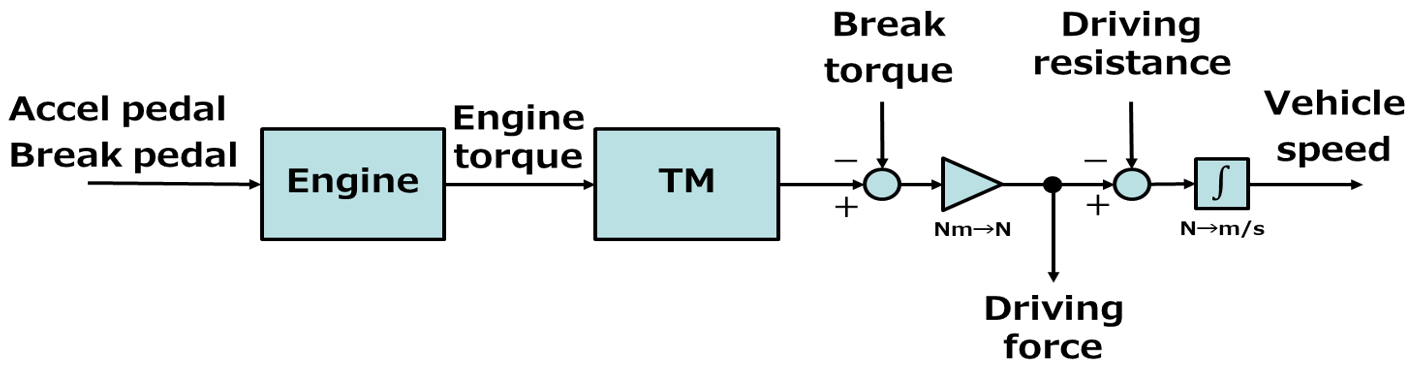
走行抵抗とは車速と反対方向に働く力である。図1にアクセル・ブレーキ開度から車速に至る自動車モデルにおいて、走行抵抗がどのように作用するかを示す。エンジンから出るトルクがトランスミッション(TM)を通り、ブレーキトルクが引かれたものがタイヤに伝わり駆動力となる。駆動力から走行抵抗を引いたものが実際に車両を動かす力であり、これが積分され車速になる。走行抵抗は空気抵抗による成分と路面との摩擦による成分に分解できる。空気抵抗は速度の二乗に比例し、路面との摩擦は平坦路ならば一定であるため、走行抵抗Frは車速をv、またA、B を定数として Fr = Av2 + B と書ける。本研究では定数Aを空気抵抗係数、定数Bを転がり抵抗係数、これらを合わせ走行抵抗係数と呼ぶ。
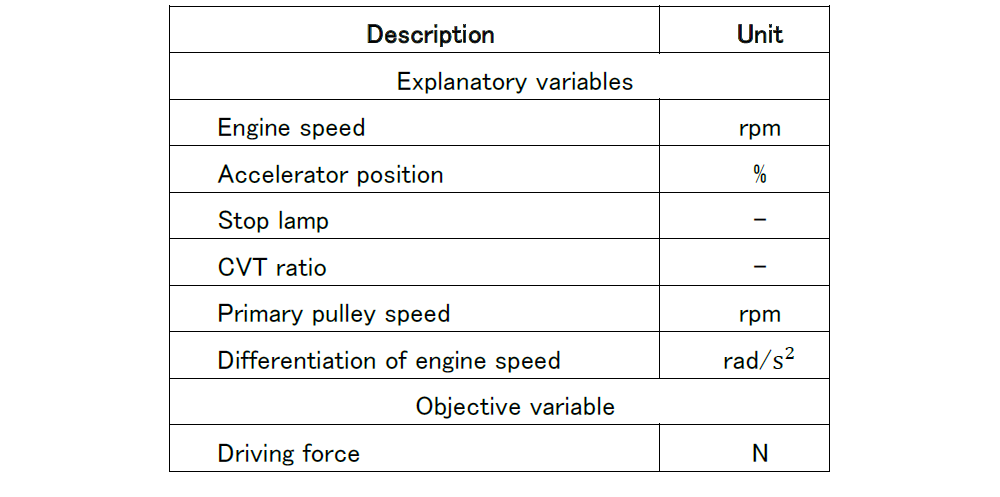
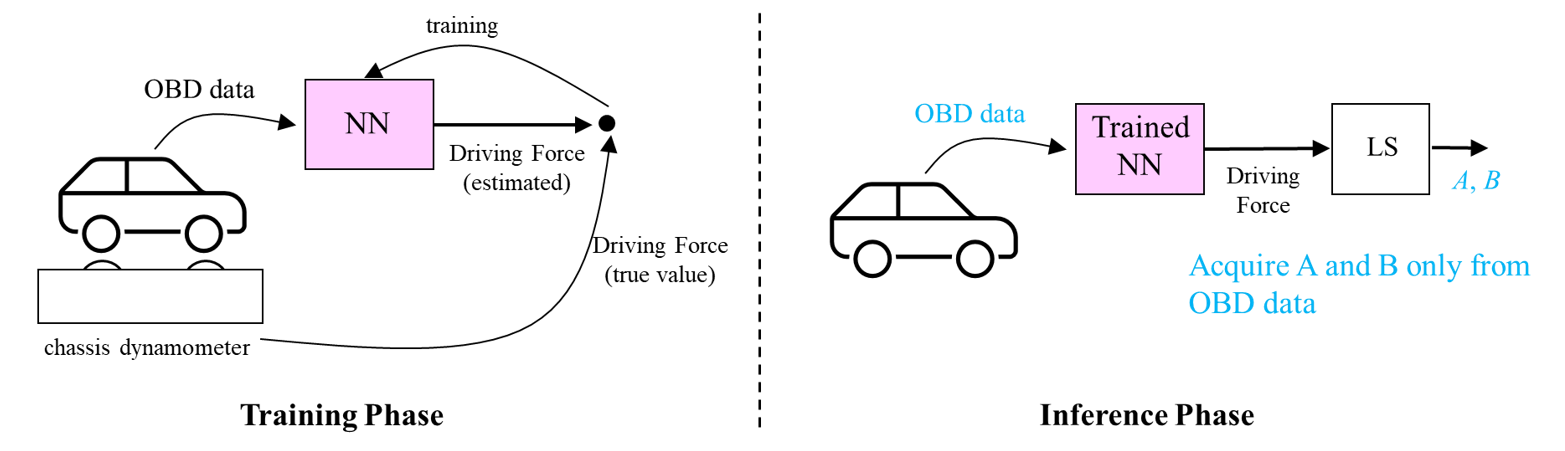
本研究ではOBDポートからの入力のみで特別なセンサなしに走行抵抗係数を推定可能にする。図2に手法の全体像を示す。手法のメインアイデアは、駆動力から走行抵抗係数を逆算することである。図1を微分形式で表すと駆動力から車速の微分を引けば走行抵抗が求まり、この走行抵抗を最もよく説明するA、Bを最小二乗法で求めれば走行抵抗係数が定まる。従って走行抵抗係数を出すには何らかの方法で駆動力が求まればよい。そこでOBDポートから取得可能なデータとニューラルネットワークで駆動力を推定する。ネットワークには車両の動的振る舞いを表現するため、過去2ステップの状態を考慮するリカレントニューラルネットワークを用い、表1の入出力を設定した。実車両から取得したデータ (3) を用い、駆動力を推定したあと、逆算した走行抵抗から一括最小二乗法によりA、Bを求めたところ、相対誤差としてそれぞれ10.4%、5.78%を達成した。
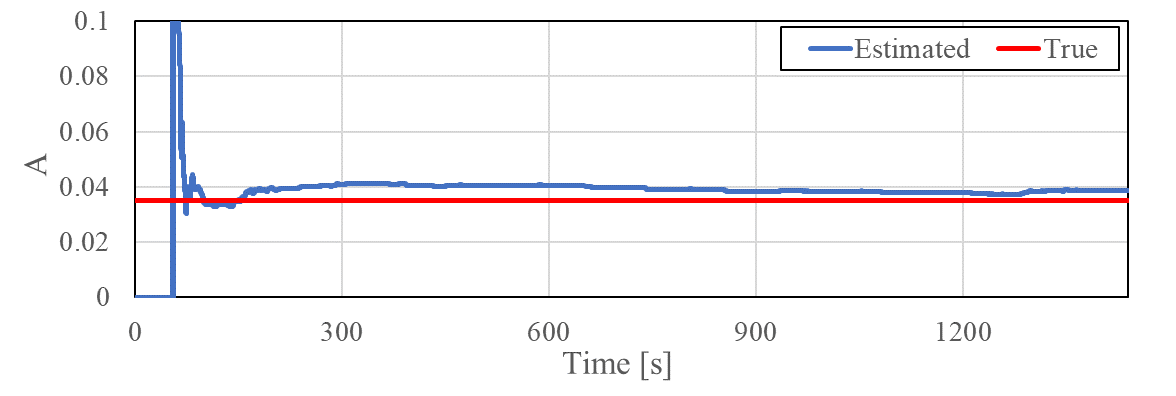
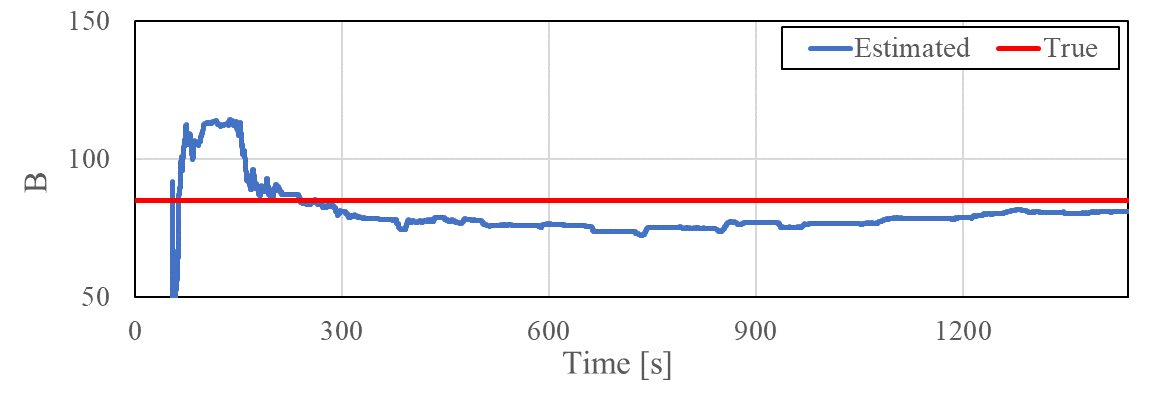
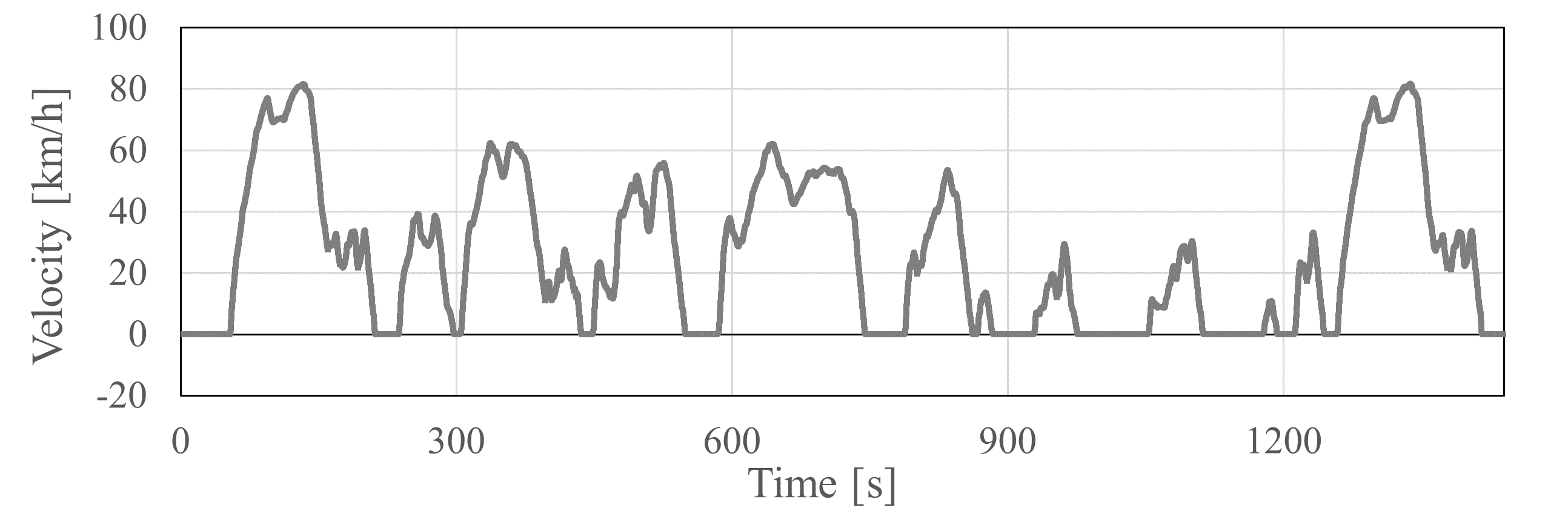
走行抵抗係数は車両や路面の状況により変化する場合がある。例えば転がり抵抗は積載重量の増減や、雨による路面とタイヤ間の摩擦の変化の影響を受ける。従って走行抵抗係数推定を車両制御に活用するには変化する係数のリアルタイムな推定が必要である。本研究では低消費電力なFPGAボードに提案ネットワークと逐次最小二乗法を実装し、装置の消費電力2.1W以下でリアルタイムに走行抵抗係数を推定可能にした。FPGAとは所望の入出力を得る回路をゲート切り替えにより実現し、CPUのような汎用計算機よりも消費電力あたりの効率が高いデバイスである。本研究では図3のPYNQ-Z1というボードを用いた。図4、図5はシャシダイナモ上の車両の走行抵抗係数のリアルタイム推定の様子であり、約300秒分のデータ入力後に安定した値に収束している。図6にシャシダイナモから取得した車速を示す。なお、表1に示したように車速はニューラルネットワークの入力としては使われていないが、走行抵抗を逆算するために必要となる。
本研究ではMBDに必要なモデル作成を簡単化し、サプライヤや研究機関でも可能にするために、走行抵抗係数をOBDポートから得られるデータのみから推定する手法を提案した。また提案手法を低消費電力なFPGA上に実装し車載でのリアルタイムな走行抵抗係数推定を可能にした。今後の展望は以下の二点である。(1) 提案手法を実路走行する車両に適用し、課題の明確化・解決を行う。例えば実路走行においては走行抵抗係数がどの程度の頻度・ダイナミックレンジで変化し、それにどの程度追従する必要があるのかを明らかにする必要がある。(2) 走行抵抗係数以外の諸元に対しても人工知能による推定を進め、MBDに必要なモデル作成の効率化を目指す。
-ニューラルネットワークを用いた走行抵抗係数推定とその FPGAによる低消費電力実装-