
TOP > バックナンバー > Vol.15 No.5 > ドライバーの動作予測および感情推定に基づくHEV制御構築に向けて
著者らは自動車用内燃機関技術研究組合(AICE)と産学共同研究として、HEV(Hybrid Electric Vehicle)の実走行燃費の向上に取り組んでいる。交通流や信号などの交通インフラ情報、またドライバーの動作予測に基づくパワートレイン制御システムの構築を目指し、「実用燃費低減制御WG(Working Group)」(2025年度からは名称を新たに「制御最適化WG」)の名のもとに、大学、企業、研究機関と協力して研究を進めている。2024年度までに各機関で構築したモデルや制御器を統合したシミュレータを構築し、その有効性を検証した。この中で、東京大学(以降、東大)ではドライバーのアクセルペダル操作量を予測するモデルを構築する役割を担っており、その活動が評価され2024年度AICE活動表彰を受けた。本報では、成果の統合評価に向けて行った際に生じた課題やその解決、他機関との議論、認識の整理からモデル等改善の活動、さらなる発展を見据えた取り組みについて紹介し、AICEとの産学共同研究を通じて得られた知見とそれに基づく所感について述べる。
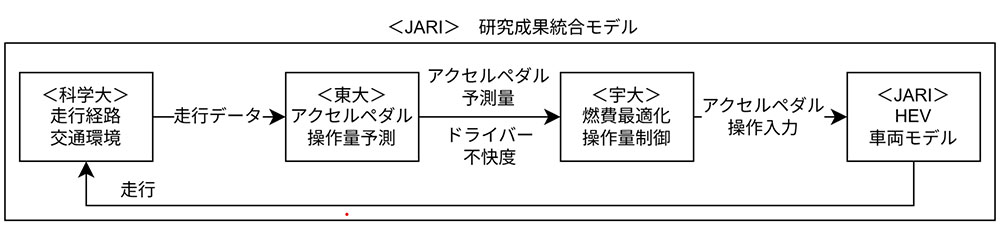
HEVは燃費性能の良い自動車として広く知られている。エンジンとモータはそれぞれ効率の良い運転領域を持っており、両方を適切に使うことで、燃費性能の高い運転が可能となる。更に高い燃費改善効果を得るためには、交通環境(先行車両等)の情報活用が有効である(1)。当WGは四つのWP(Work Package)から構成されており、WP2「運転バラつきを加味した駆動力制御」において、交通環境や車両の情報から将来のアクセルペダル操作量を予測し、操作感を損なわい範囲で燃料消費量が最小となる制御システム構築を目的とした構成、活動となっている。このWP2では図1に示すように、交通環境情報の整理は東京科学大学(以降、科学大)、アクセルペダル操作量の予測は東大、予測を用いた制御は宇都宮大学(以降、宇大)が担当し、JARIで車両シミュレータに各機関で構築したモデルや制御器の研究成果を統合し、燃費改善効果を検証する活動が行われた。
LSTMベースモデルの改善 検証環境を構築するため、各機関が構築したモデルや制御器を統合する必要があったが、走行距離15km程度をシミュレーションするため、走行全体の計算負荷が重くなることが考えられた。東大で構築したドライバー予測モデルは機械学習の中でも時系列予測の可能なLSTM(Long Short-Term Memory)を使用している(3) 。これは時系列データを過去から順に「記憶セル」へ入力し、重要な情報を選別・保持・出力することで、時系列データ内の依存関係を学習する。一つの計算ステップで時系列データ(100サンプル×6変数)を入力し予測するため計算量が膨大となる。計算負荷の軽量化に向け、本モデルについては毎度過去の100ステップ分の時系列データをLSTMへ入力するのではなく、それらが一つ前のステップで得られる記憶セルの情報に含まれているものとして、その値を一つ先のステップで使用することにより時系列データの入力を省略した(図2)。予測時の計算速度を80%ほど低減でき、検証時間の短縮化に貢献できた。
しかし、構築したモデルをJARIへ提供した際、検証モデルへの組み込みにエラーが生じた。それを解消させるべく、JARIと協力して原因究明を行った。物理的な距離や時間の関係で対面での議論が難しかった中でも、問題発生部分の画面キャプチャや解決方法の図などを用いたやり取りにより、約5日という素早さで問題を解消できた。
宇大との議論で、ひとまず統合検証が行えるように不快度を「実際の操作量」と「予測値」との差分を用いて一旦定義したが、より精緻に不快度を定義するため、また運転中にリアルタイムにオンボードで把握する手法を検討するために、運転中におけるドライバーの感情を取得する目的で図3に示すような試験システムを構築した。これは、ドライビングシミュレータでの運転中に、運転データ(アクセルペダル操作量、車間距離等)と生理指標(脳波、脈波等)を同時計測するものである。不快の感情を生理指標から取得し、運転データとの関係性を分析し紐づけることによって、生体信号計測を使わずに不快度を定義、把握することを目指している。将来的には運転データから得た不快度等の感情を使用し、操作量修正の調整のみではなく、アクセルペダル操作量予測へ応用し、予測精度を向上させることを検討している。
Movie.1 シミュレータ試験の様子
AICEとの共同研究において、HEVの実走行燃費の向上という目的のため、他大学の教員、学生、および企業、研究機関の方と連携し、統合環境を用いた燃費向上の検証を行った。これまでにない新たなシステムをモデルベースで検討しており、実機による制約がなく設計の自由度が高いことが、自身がやりたいことを自由に導入できる反面、他の機関とのインターフェース部の認識が合わないことがあった。その際は、他機関で構築したモデルでも数式で記述されているモデルベースであるからこそ、逐一プログラムを追いかけることで理解を可能とし、加えて、画面キャプチャや対面による議論により齟齬の解消、問題の解決ができた。相手方の研究分野や概念について理解する姿勢が共通認識への第一歩であると痛感した。今後もこの活動が続くため、関係者と積極的に議論し、更なる燃費向上を目指したいと考える。本活動でご協力いただいたすべての大学、企業、研究機関の関係者の方々に改めて感謝する。


コメントを書く