
TOP > バックナンバー > Vol.15 No.5 > シリーズハイブリッド電気自動車におけるドライバのアクセル操作緩和による省燃費制御
ハイブリッド電気自動車(HEV: Hybrid Electric Vehicle)のエネルギーマネージメント(EM: Energy Management)はドライバーの挙動と密接に関係しており、ドライバーの挙動によっては性能が損なわれる。そこで本研究では、通常のEM制御系の外側にドライバーのアクセル操作を緩和することで省燃費を達成するEM制御系をモデル予測制御(MPC: Model Predictive Control)により構築する。その際に必要となるHEVの数学モデルはニューラルネットワークを用いて構築した。MPCの評価関数については、できるだけ目標車速へ追従しつつ、走行に費やす燃料消費量やバッテリの充電率(SOC: State of Charge)の低下を抑えるため、目標車速との偏差だけでなく、アクセル開度と車両速度そのものも評価することとした。最後に、本手法の有効性をシミュレーションにより検証し、省燃費が達成できることを示した。
HEVのEM制御系はドライバーの要求駆動力を満たしつつ、パワートレインのエネルギー伝達効率を最適化するように設計される。しかし、急な加減速を好むドライバーなど、ドライバーの挙動によっては、省燃費の達成が難しくなる。そこで本研究では、通常のEM制御系の外側に、ドライバーに不快感を与えない範囲でドライバーのアクセル操作を緩和するEM制御系を追加することで省燃費を実現する方法を提案する(1)。制御系の構築には時々刻々と走行状況が変化するHEVの制御に適するとされるモデル予測制御(MPC)、HEVの数学モデルの構築には時系列データさえあれば容易に数学モデルが構築できるニューラルネットワーク(NN)を用いる。その際に用いるHEVのモデルはシリーズ型とし、MATLAB/SimulinkとGT-SUITEで構築した。
ニューラルネットワークによるHEVのモデリングHEVは、エンジン、モータ、そしてそれらを統合するEM制御系を含み、物理法則等に基づく第一原理モデリングが難しい。そこで、制御系設計支援ソフトMATLABのSystem Identification Toolboxのニューラル状態空間モデル(以下、NNモデル)を用いて数学モデルを求めることとした。NNモデルを用いたシステム同定法では、入力(制御入力と外部入力)と状態変数の関係をニューラルネットワークで学習し、非線形な状態方程式を得ることができる(2)。ここでは、ドライバーから入力されるアクセルとブレーキおよびHEVの制御系から得られる燃料消費率、外部情報として得られる路面勾配を入力、HEVの車両速度とバッテリのSOCを状態変数とするNNモデルを構築した。学習データには、実路走行から測定した走行パターンを使用した。図1に構築したNNモデルの推定結果を示す。車両速度に関しては真値(実線)に対して推定値(破線)がほぼ一致していることが確認できる。SOCに関しては最終値に若干の誤差が見られるが、その他の個所では真値に対して推定値がほぼ一致していることが確認できる。本節で構築したNNモデルをMPCの予測モデルとして用いる。
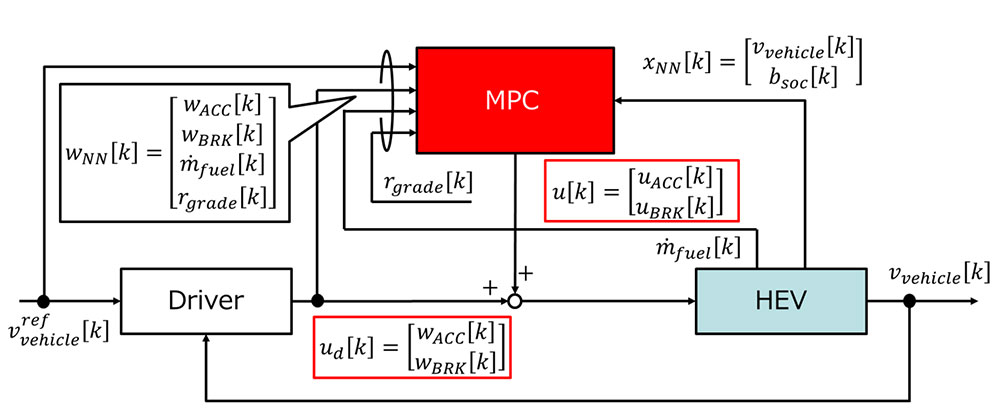
アクセル操作を緩和する非線形モデル予測制御系モデル予測制御は制御器内部に制御対象の予測モデルを持ち、評価関数を最小にする制御入力を逐次決定する最適制御の一種である。本研究では前節で構築したHEVの数学モデルが非線形性を有するため非線形MPCを使用する。MATLABのModel Predictive Control Toolboxでは、非線形MPCを実現する関数があらかじめ用意されており、予測モデル、評価関数および制約条件を定義することで、非線形MPCが比較的簡単に実装できる(3)。本研究で構築した制御系の全体構成を図2に示す。「HEV」はHEVモデル、「Driver」はドライバーモデル、「MPC」は非線形MPCを表す。ドライバーのアクセル操作wACC[k]およびブレーキ操作wBRK[k]をMPCからの制御入力u[k]により修正する構造となっている。ただし、k=0,1,2,…は離散時間を表す。その際、MPCは車速目標値vvehicleref [k]のほか、ドライバーのアクセル操作wACC[k]、ブレーキ操作wBRK[k]、燃料消費率mfuel[k]、および路面勾配rgrade[k]と、HEVの状態変数である車速vvehicle[k]およびSOC bsoc[k]が利用できるものとした。また、車間距離に制約を持たせるため、状態変数として先行車との車間距離を追加し、車間距離が0 m以上350 m以下となるように制約条件を定義した。評価関数については、先行車に追従しつつ、できるだけSOCの減少とアクセル操作および車両速度を抑えるようなものに選んだ。
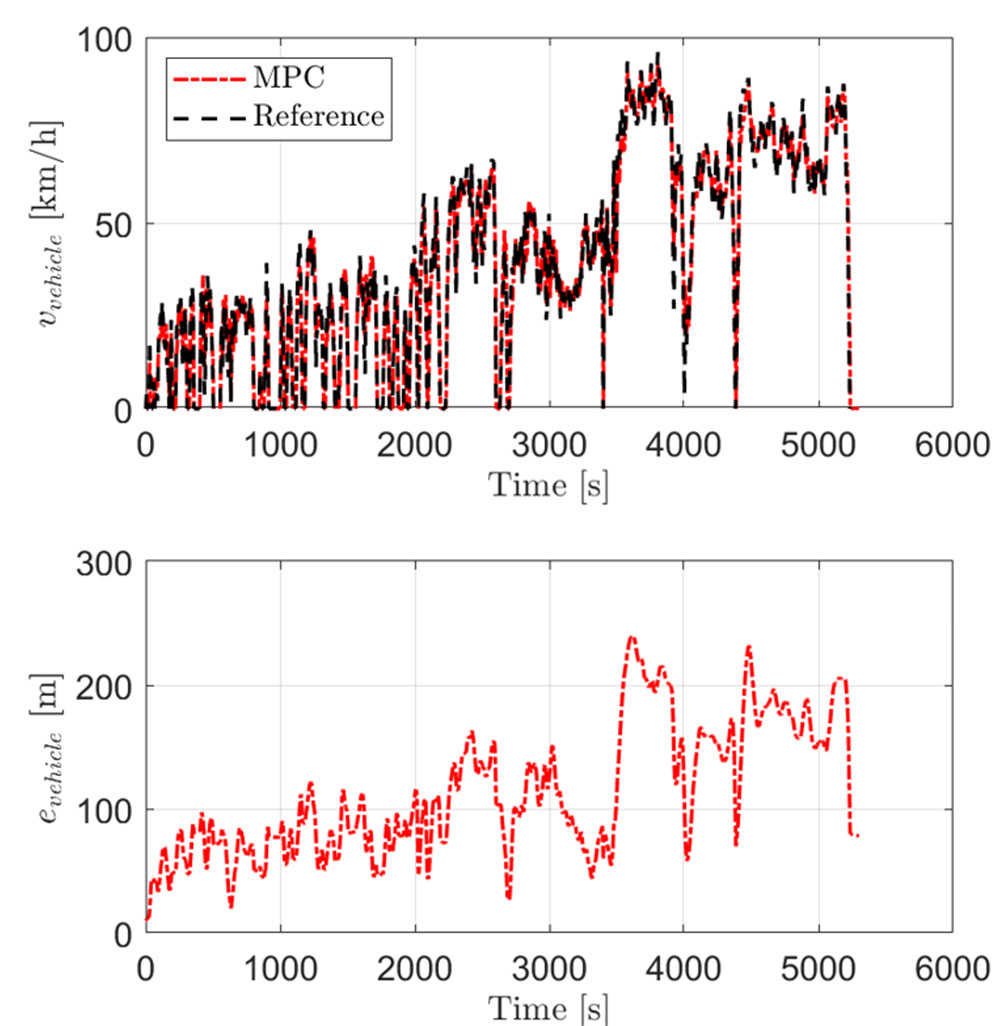
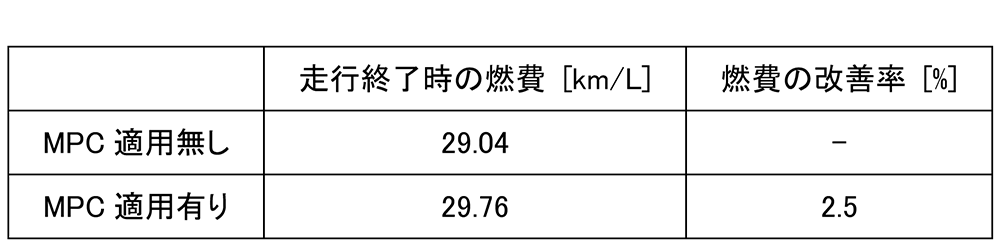
構築した制御系による数値シミュレーション本来直接得ることができない目標車速は、目標車速で走る先行車を追従して走行する状況においてドライバーモデルなどを用いて推定できると仮定し、真値が得られるものとした。また、目標車速は実路で測定した走行パターンを使用した。ドライバーモデルには、目標車速から、車両特性の逆モデルを使ってアクセルおよびブレーキ操作量を求めるフィードフォワード制御器を用いた。図3に車両速度と車間距離の応答、図4に燃費の応答、Table1に走行終了時の燃費と改善率を示す。ただし、燃費については、SOCの変化も燃料消費に換算して計算している。図3より、車両速度は目標値に概ね追従していることが確認できる。車間距離は拘束条件に従って0から350 mの範囲で動作していることが確認できる。図4より、燃費の応答は、 MPC適用前の結果を上回っていることが確認できる。表1より、走行終了時の燃費はMPC適用無しよりも2.5 %程度向上していることが確認できる。以上から、アクセル操作を緩和することで燃費の向上が可能であることを確認した。
本研究では、実路で測定した走行パターンを用い、ドライバーのアクセル操作を緩和することで省燃費を達成する非線形モデル予測制御系を設計し、数値シミュレーションによりその有効性を検証した。その結果、目標車速への追従と車間距離の条件を満たしつつ、燃費が最大で2.5%程度向上することを確認した。今後の課題としては、ドライビングシミュレータを用いて人がドライブした場合の燃費性能の評価などが挙げられる。


コメントを書く